SI2025で本プロジェクトのOSを組織し、成果を報告しました。
![]()
ムーンショット型研究開発事業

自ら学習・行動し人と共生するAIロボット
SI2025で本プロジェクトのOSを組織し、成果を報告しました。

筑波大学東京キャンパスにおいて、プロジェクトの最後のまとめとなる「最終研究打合せ」を開催しました。

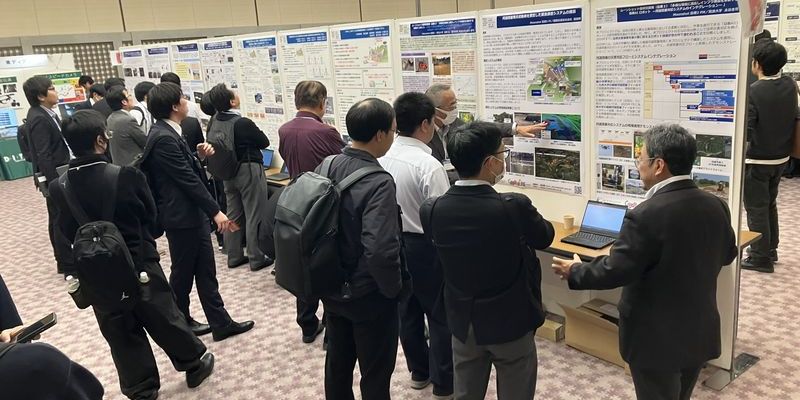
第23回建設ロボットシンポジウムで本プロジェクトの成果を報告しました。

東北大学がドローンから球体を投下して地盤強度を推定するデモを行いました.写真は,ドローンから球体を投下している様子を示しています.
日本ロボット学会学術講演会において、本プロジェクトの成果を発表しました。

TV局や新聞社を招いて公開実験を行いました

ロボットハンドを大型化し熊谷組技術研究所において実証実験を行いました。

九州大学伊都キャンパス内 実験フィールドにおいて、マスコミや関係者を対象とした公開実証実験を行いました。

九州大学伊都キャンパス内 実験フィールドにおいて、本プロジェクトの評価委員やガバメント委員が参加するプロジェクト全体会議が開かれました。

ETHZ(スイス連邦工科大学チューリッヒ校)で開発した人の手の2倍サイズのロボットハンドをバックホウに取り付け、動作実験を行いました。ワイヤ駆動のこのハンドは、力強さと器用さを兼ね備えています。

日本科学未来館で開催した「ムーンショット目標3 公開シンポジウム2025 人と共生するAIロボットを目指して」において、本プロジェクトの成果を報告しました
2024年12月18日~20日に計測自動制御学会システムインテグレーション部門講演会が盛岡で開催されました。その学会で本プロジェクトに特化したセッション(オーガナイズドセッション)を開催し、16件の技術発表を行いました。

成蹊大学のチームがSKマテリアル吾野フィールドで砕石自動運搬システムの公開実証実験を実施しました。
2024年5月13日~17日に開催されたロボティクスとオートメーションに関する国際会議,IEEE ICRA 2024 (International Conference on Robotics and Automation) に、大阪大学が開発した分離合体ロボットを展示しました

大阪大学が開発した,無限定環境に対して組み替え可能な分離合体ロボットi-CentiPot-Ammoniteとそのための汎用搬送コンテナBRAINSを提案しました.

2024年6月12日~13日に、2004年の中越地震で河道閉塞を起こした新潟県長岡市芋川の寺野地区と東北沢地区の現地視察をしました。

国土交通省による遠隔施工等実演会(施工DXチャレンジ2023)において開発した次世代作業機Cafeによる力制御のデモを行いました.

東北大学がバケット掘削による地盤強度推定・走行デモを行いました.写真は,ミニショベルが地盤強度を推定しながら軟弱地盤を避けて移動している様子です.

河道閉塞の閉塞部において,現地の状況を把握するための地形計測センサポッドのドローン運搬設置試験を実施しました.
東京大学,成蹊大学,土木研究所,大阪大学,九州大学のチームが,九州大学屋外フィールドで自動土砂運搬システムの公開実証実験を実施しました.

小型協働作業ロボットを用いた月面インフラ構築に向けた要素技術の公開実証実験を実施しました.

大阪大学が開発した柔軟移動ロボットを用いて,屋外不整地走行実験を実施しました.写真は,水上から陸上に進行する実験機 i-Centipot Amphibian Jr.です.

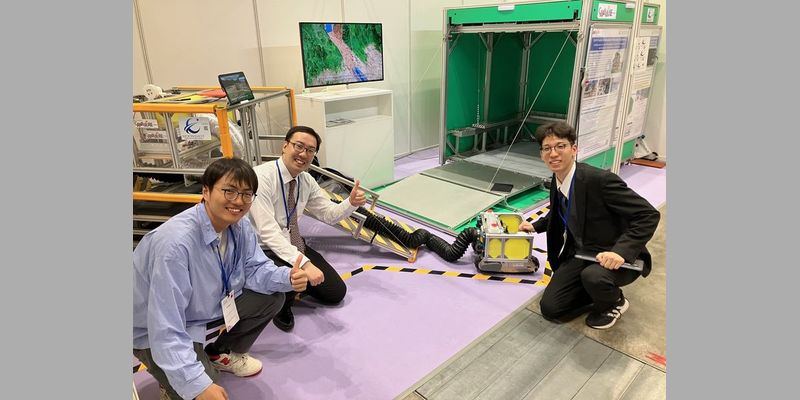
JAXAテストフィールドにて,小型ロボットプラットフォームを用いた走行ならびに土工作業の各種実験を行いました.

大阪大学が開発した柔軟移動ロボットを用いた屋外実験を実施しました.写真は,屋外で走行する実験機 d-FlexCraw です.

河道閉塞模擬環境として,二瀬ダム(秩父市)で,河道閉塞用のセンシング機器実証実験,通信試験,ドローン空撮などを実施しました.

酒井重工業(株)の試験ピットにおいて,九州大学が開発している振動ローラを用いた地盤剛性計測手法についての転圧実験を行いました.
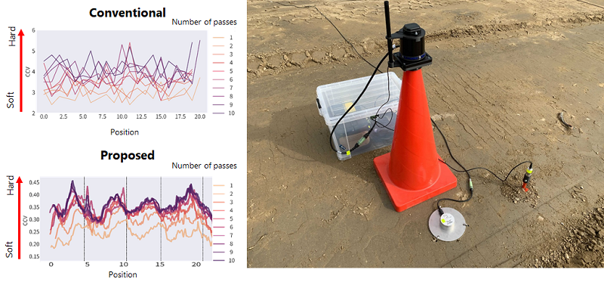
分散型センサポッドによる転圧地盤の強度推定手法を開発しました.

センサポッドで得られる3次元点群を用いた建設機械の位置推定手法を開発しました.
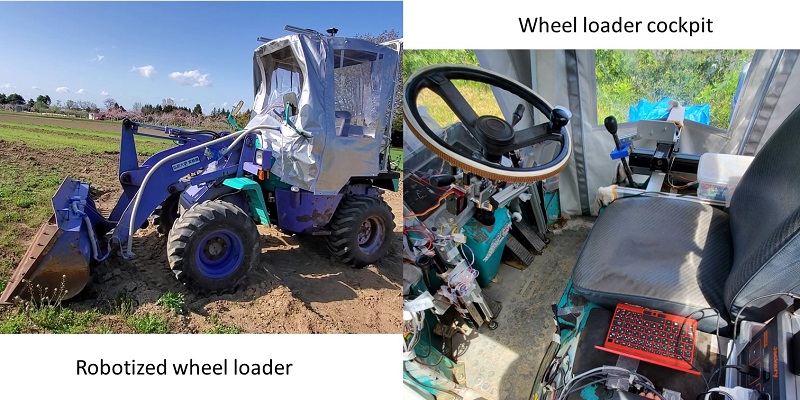
弘前大学が開発したレトロフィット化されたホイールローダを用いた遠隔操縦・自律走行制御の実験を行いました.

土木研究所が開発したオープンプラットフォーム(OPERA)をGitHub上に公開しました.

JAXAテストフィールドにて小型ロボットプラットフォーム試作機の初期動作実験をおこないました.
私たちCAFEプロジェクトは、ムーンショット目標3「自ら学習・行動し人と共生するAIロボット」というグループにおいて
「多様な環境に適応しインフラ構築を革新する協働AIロボット」の研究開発を進めています。
CAFEプロジェクトは、Collaborative AI Field robot Everywhereからきています。
2024年より新体制に移行し、これまで開発してきた技術のシステムインテグレーションを目指します。

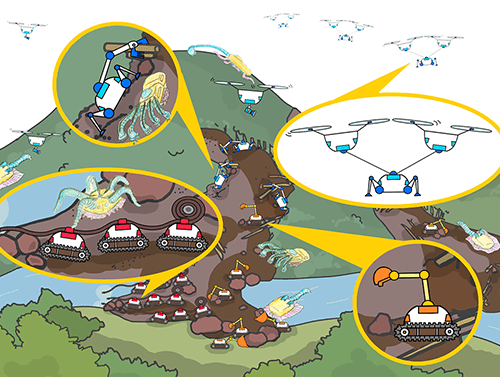
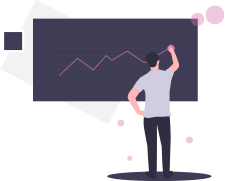
2050年における自然災害現場での
応急復旧イメージ
私たちが住む日本では、さまざまな自然災害が各地で頻発しています。そこに暮す人々の生活を守り、災害の被害を最小限に抑えるため、応急復旧の更なる技術開発が望まれています。そこで、本プロジェクトでは、災害現場に代表される難環境において、想定と異なる状況に対して臨機応変に対応し、作業を行うことが可能な「協働AIロボット」の研究開発を行います。2050年には、この「協働AIロボット」が、人の替わりに自然災害の応急復旧を実現すると共に、この技術が、地上のインフラ構築や維持管理にも役立ちます。
左のイラストは、2050年における自然災害現場での応急復旧イメージを表しています。複数台のフィールドロボットが、センシングデータを元に災害の状況を正確に評価した後、ロボット協働作業を実施することで、想定外の状況に対応しながら災害の応急復旧に取り組みます。本プロジェクトでは、2025年までのマイルストーンとして、自然災害(特に河道閉塞災害)の減災を目的とした、想定と異なる状況に対して臨機応変に対応する複数台協働AIロボットのシステムのプロトタイプを開発します。
本研究開発プロジェクトの大目標は、「協働AIロボットシステムによる多様な環境に適応したインフラ構築の実現」です。この大目標を実現するため、「1.土工を革新するAIロボットシステム」(ハードウエア)、「2.複数台ロボットの動的協働システム」(複数台ロボットを制御するAI)、「3.現場を俯瞰するセンサポッドシステム」(センシング技術と環境を評価するAI)という3つの研究開発項目を設定し、並行して研究開発を進めてきました。
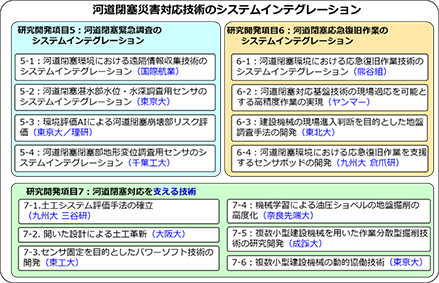
2024年以降は、右図に示すとおり、自然災害(特に河道閉塞災害)に対応可能なロボットシステムに焦点を絞り、技術革新を進めると共に、これらの技術のシステムインテグレーションを目指します。

皆さま、こんにちは。永谷圭司と申します。内閣府のムーンショット型研究開発事業 目標3における「多様な環境に適応しインフラ構築を革新する協働AIロボット」のプロジェクトマネージャーを担当しています。
本プロジェクトは「自然災害に対する応急復旧」を可能とするフィールドロボットの実現を目指しております。このためには、ロボット自らが、状況に応じて臨機応変に対処する能力が必要となります。そこで、本プロジェクトでは、様々なアプローチにより、これらの実現を目指していきます。
プロジェクトの紹介については「プロジェクト概要」に譲り、ここでは、本プロジェクトで私が最も大切にしております三つのことをお伝えしたいと思います。
まず、一つ目はプロジェクトの基本理念についてです。本プロジェクトの基本理念は、「人の役に立つ技術を創造すること」です。これは私がこれまでに大切にしてきたフィールドロボット研究に対する基本理念と同じものです。 「(自分の得意な)○○という技術を実現しました。後は、△△ができれば、これは役に立ちます。」という言い訳は決してせず、実用化までを見据えた技術開発を行う方針が、ここには込められています。
大切にしております二つ目は、研究者・技術者の横の繋がりです。本プロジェクトは、多分野間の協力が不可欠で「土木」「機械」「AI」のどれが欠けても成立しません。そのため、それぞれの分野の研究者が、お互いの分野を尊重しつつ密に情報交換を行い、横の連携を強固にした研究開発を進めたいと考えています。
最後の三つ目は、現場主義です。本プロジェクトでは、ロボットが活動できるような現場を人工的に設定して実証するのではなく、実現場での活動が可能なロボットの開発を心がけたいと考えています。
本プロジェクトの推進メンバーには、現在、各々の研究分野で活躍している大変パワフルな研究者たち・技術者たちが揃いました。とても嬉しく思っております。ぜひ、本プロジェクトの今後の成果をご期待ください。
プロジェクトマネージャー/筑波大学 システム情報系 教授
永谷圭司
1984年 大阪大学大学院基礎工学研究科修士課程修了。大阪大学大学院工学研究科機械工学専攻教授、創造工学センター長、コマツみらい建機協働研究所所長、ロボティクス、制御工学の研究に従事。工学博士。

大須賀 公一
大阪工業大学 特任教授
1993年 筑波大学大学院修士課程修了,2010年 Bielefeld大学,博士(工学).現在はヤンマーホールディングスにて,農業,土木建設,海洋におけるフィールドロボティクスの研究開発に従事.

杉浦 恒
ヤンマーホールディングス株式会社 技術本部イノベーションセンター ロボティクス担当主席
九州工業大学客員教授、
福島大学客員教授
1991年九州大学修士課程修了 。博士(工学)。 2013年より現職.岩盤工学,地圏環境工学をベースに地理空間情報の利活用,防災に関する研究に従事.

三谷 泰浩
九州大学大学院 工学研究院 附属アジア防災研究センター 教授
2010年 Wayne State UniversityでPh.D.の学位授与.現在は,東京大学
i-Constructionシステム学寄付講座にて,AI,IoT技術を活用したインフラ建設,維持管理や,プラットフォーム技術の発展に取り組んでいる.

全 邦釘
東京大学大学院 特任教授
2013年より東北大学大学院情報科学研究科教授.2016年から理化学研究所革新知能統合研究センター兼務.専門はコンピュータビジョンと深層学習.

岡谷 貴之
理化学研究所 チームディレクター
1983年東海大学工学部卒.現在は、株式会社熊谷組にて、建設ICT、建設機械自動化および無人化施工技術の開発および研究に従事.

北原 成郎
株式会社熊谷組 土木事業本部 土木技術統括部 土木DX推進部 技術部長
1985年 岩手大学大学院農学研究科修了 修士(農学).現在は、国際航業株式会社にて,火山噴火時の調査の無人化に向けた技術開発を含む砂防分野の調査・計画・設計等の検討業務に従事している.
島田 徹
国際航業株式会社 事業統括本部 国土保全部 事業企画担当部長
1984 年東京大学大学院修士課程修了.工学博士(1989年,東京大学).東京大学大学院工学系研究科教授および同研究科人工物工学研究センター長を経て,現職.サービスロボティクスの研究・社会実装等に従事.

淺間 一
東京大学国際高等研究所東京カレッジ 特任教授
2007年 奈良先端科学技術大学院大学博士後期課程修了.博士(工学).現在は,同大テニュアトラック教員として,ロボットラーニング研究室を主宰.機械学習と実世界ロボット応用に関する研究に従事.

松原 崇充
奈良先端科学技術大学院大学 先端科学技術研究科 教授
1986年 東北大学大学院博士課程修了.工学博士.研究分野はテラメカニックス.現在は機械と地盤の相互作用に基づく地盤評価に関する研究に従事.

高橋 弘
東北大学大学院環境科学研究科 特任教授
1991年 東京工業大学大学院修士課程修了.博士(工学).富士通研究所,東京工業大学,東京大学生産技術研究所を経て,2007年より現職.サービスロボット,認知症ケアの研究に従事.

倉爪 亮
九州大学大学院システム情報科学研究院 教授
博士(工学)(2007年,筑波大学).茨城県工業技術センター,産業技術総合研究所,筑波大学,成蹊大学,弘前大学を経て,現職.ロボット制御技術の社会実装や触覚技術に関する研究に従事.

竹囲 年延
成蹊大学 准教授
博士(工学)(東京大学).千葉工業大学.

藤井 浩光
千葉工業大学 准教授
Robert received his Ph.D. in Mechanical Engineering from the Massachusetts Institute of Technology (MIT) in 2018. He is an Assistant Professor of Robotics at ETH Zurich, where he leads the Soft Robotics Lab. He is also a core faculty member at the ETH AI Center, the ETH Center for Robotics, and the ETH-MPI Center for Learning Systems. His research focuses on musculoskeletal robotics, soft robotics, and biohybrid robotics, aiming to develop lifelike robots that interact safely with humans and the environment.

Robert Katzschmann
Assistant Professor, ETH Zurich


2025/07/17
Journal
Yuki Kadokawa, Hirotaka Tahara, Takamitsu Matsubara (2025), “Progressive-Resolution Policy Distillation: Leveraging Coarse-Resolution Simulations for Time-Efficient Fine-Resolution Policy Learning”, IEEE Transactions on Automation Science and Engineering., July, 2025. Vol. 22, pp. 18682-18693.
2025/06/11
Journal
Korawat Charoenpitaks, Van-Quang Nguyen, Masanori Suganuma, Kentaro Arai, Seiji Totsuka, Hiroshi Ino, Takayuki Okatani (2025), “TB-Bench: Training and Testing Multi-Modal AI for Understanding Spatio-Temporal Traffic Behaviors from Dashcam Images/Videos”, 2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops., June, 2025. pp. 2436-2446.
2025/05/21
Journal
Shiori Kubo, Mayuko Nishio, Junya Inoue, Takashi Miyamoto, Pang-jo Chun (2025), “Effective Prediction of Ground Consolidation Settlement by Physics-Informed Neural Networks”, Intelligence, Informatics and Infrastructure., May, 2025. Vol. 6(1), pp. 137-149.
2025/04/11
Journal
Kittitouch Areerob, Van-Quang Nguyen, Xianfeng Li, Shogo Inadomi, Toru Shimada, Hiroyuki Kanasaki, Zhijie Wang, Masanori Suganuma, Keiji Nagatani, Pang-jo Chun, Takayuki Okatani (2025), “Multimodal artificial intelligence approaches using large language models for expert-level landslide image analysis”, Computer-Aided Civil and Infrastructure Engineering., April, 2025. Vol. 40, pp. 2900-2921.
2025/01/22
Journal
Yongdong Wang, Runze Xiao, Jun Younes Louhi Kasahara, Keiji Nagatani, Atsushi Yamashita, Hajime Asama (2025), “ACRC-LLM: A Framework for Automated Construction Robotics Control Using Large Language Models”, Proceedings of the Joint Symposium of AROB-ISBC-SWARM2025., January, 2025. Vol. GS18-1, pp. 486-490.
2025/01/21
Journal
Koki Yoshino, Kazuto Nakashima, Jeongho Ahn, Yumi Iwashita, Ryo Kurazume (2025), “S2Gait: RGB-based Gait Recognition with Style Feature Sampling Data Augmentation”, The 2025 IEEE/SICE International Symposium on System Integration (SII2025)., January, 2025. pp. 375-380.
2025/01/21
Journal
Jeongho Ahn, Kazuto Nakashima, Koki Yoshino, Yumi Iwashita, Ryo Kurazume (2025), “Gait Sequence Upsampling using Diffusion Models for single LiDAR sensors”, The 2025 IEEE/SICE International Symposium on System Integration (SII2025)., January, 2025. pp. 658-664.
2025/01/21
Journal
Hiroto Kodama, Hiroyuki Nabae, Gen Endo, Koichi Suzumori (2025), “Verification of the Effect of Design Parameters on the Radius of Curvature of Vine-like, Power Soft Gripper”, The 2025 IEEE/SICE International Symposium on System Integration (SII2025)., January, 2025. pp. 702-706.
2025/01/01
Journal
Jorge Ruben Casir Ricano, Sota Yuasa, Ryota Hino, Tomoki Koshi, Tatsuya Oyama, Kenji Nagaoka (2025), “Resilient Mobility of a Four-Wheeled Planetary Rover with Active Suspension”, Acta Astronautica., January, 2025. Vol. 229, pp. 418-429.
2024/11/12
Journal
Ryuichi Maeda, Tomoya Kouno, Kohei Matsumoto, Yuichiro Kasahara, Tomoya Itsuka, Kazuto Nakashima, Yusuke Tamaishi, Ryo Kurazurne (2024), “Sensor Pods and ROS2-TMS for Construction for Cyber-Physical System at Earthwork Sites”, 2024 IEEE International Symposium on Safety Security Rescue Robotics (SSRR)., November, 2024. pp. 58-63.