レトロフィット化されたホイールローダのアーム・バケット制御、自律走行制御の実装を行いました。
弘前大学ではホイールローダによる自律土砂運搬作業を行うための研究開発をしています。自律土砂運搬作業を達成するには、土砂の掬い取り、土砂の積み下ろし、掬い取り・積み下ろし点間の走行、これら3つの作業を自動化する必要があります。我々はレトロフィット化されたホイールローダを用いてアーム・バケット制御,走行制御を実装しました。
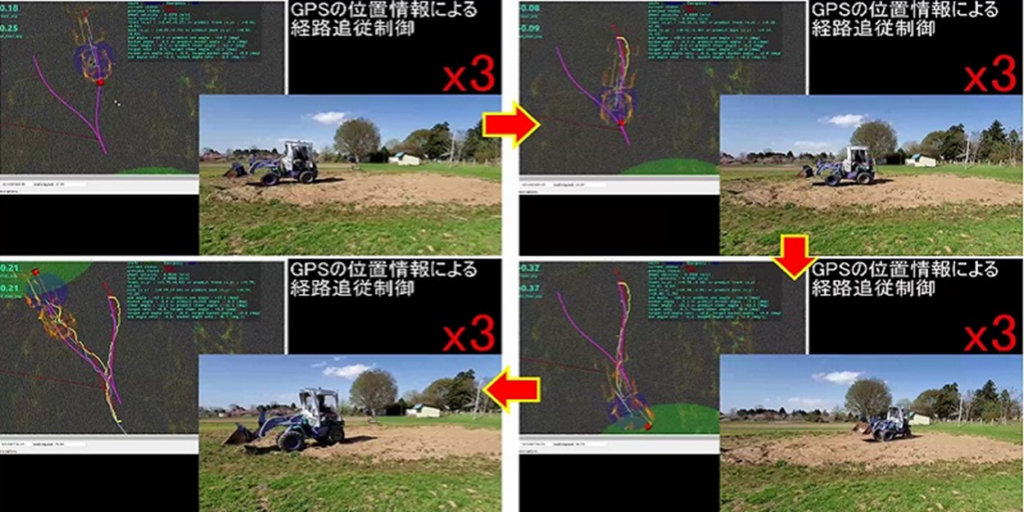
写真はホイールローダの自律土砂運搬作業での土砂の掬い取り・積み下ろし動作に必要なアーム・バケット制御の様子と、走行経路の生成,生成された経路に対する経路追従制御の様子です。