We implemented a retrofitted wheel loader with arm/bucket control and autonomous driving control.
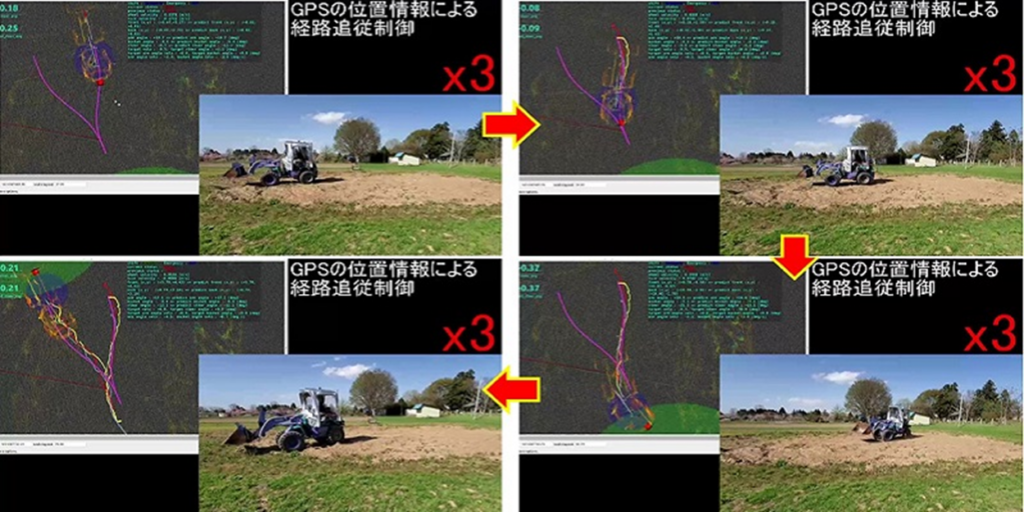
Hirosaki University conducts research and development for autonomous gravel piles transportation using a wheel loader. To achieve this work, it is necessary to automate these three operations: gravel pile scooping, unloading, and moving between scooping and unloading points. We implemented arm/bucket control and driving control using a retrofitted wheel loader. The photo shows the arm/bucket control required for this work, the generation of the moving path, and the path-following control using the generated path.