We developed a method for estimating the position of construction vehicles using 3D point clouds obtained from sensor pods.
We developed a method for estimating the position of construction vehicles using 3D point clouds obtained from Sensor pods and 3D models of construction vehicles (backhoe, crawler dump, etc.). We also conducted a following control experiment using a construction vehicle with a retrofit device, based on the position estimated by sensor pods.
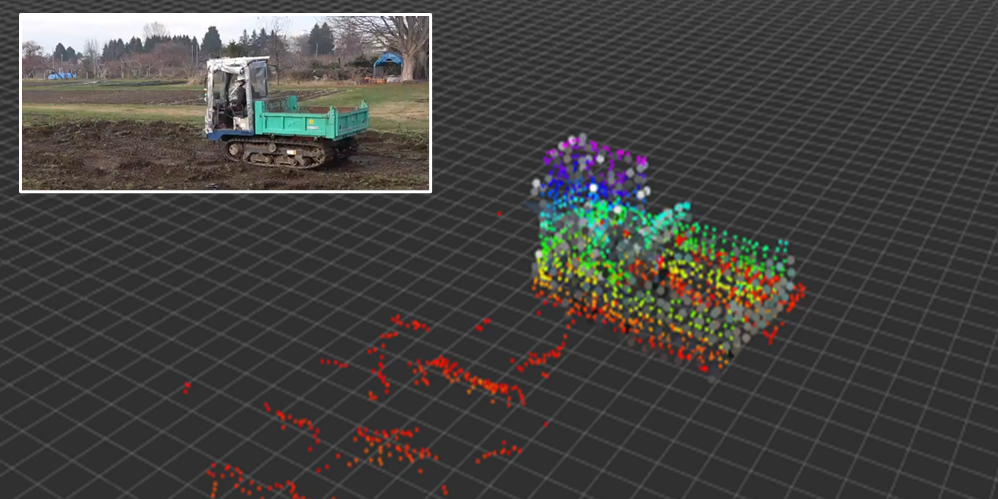
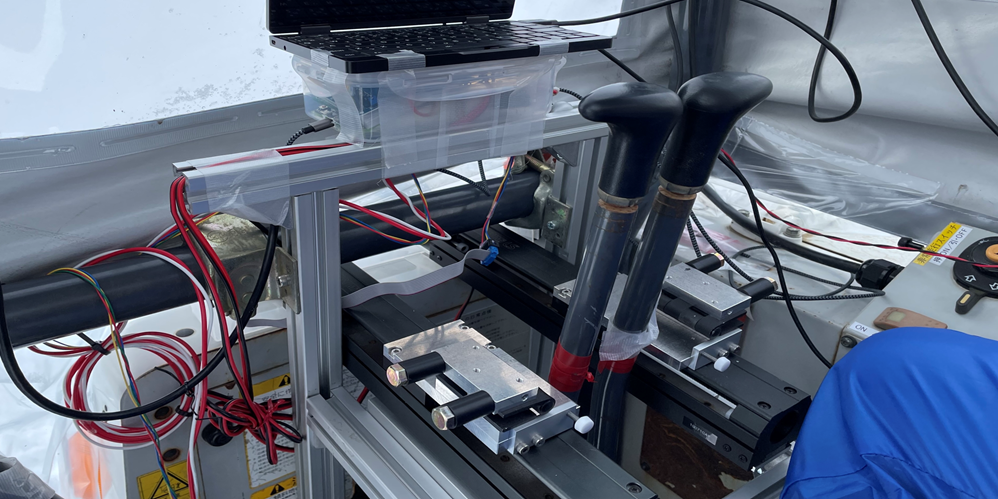
In the photo above, the position of the construction vehicle is being estimated from the 3D point cloud by the sensor pod installed in the field. The photo on the bottom is a retrofit device that automatically controls lever operation.