2022/06/02
Tweet
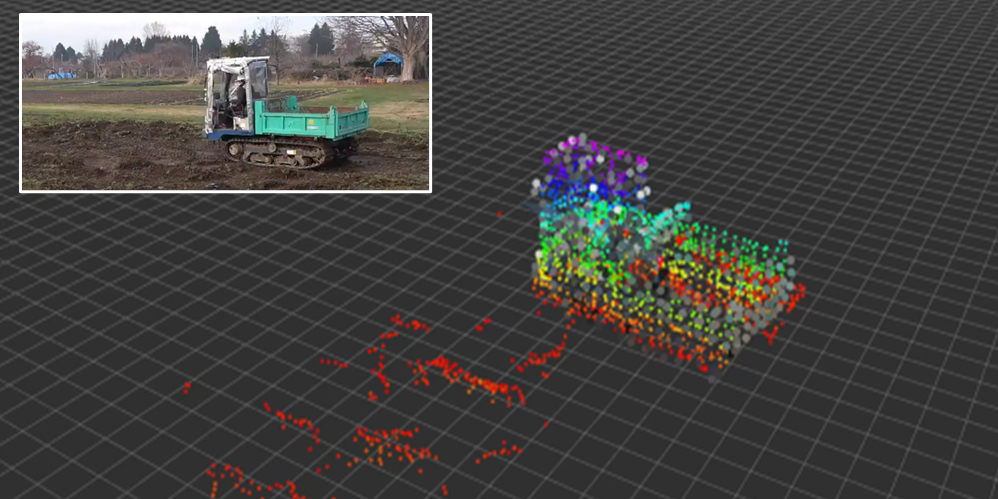
センサポッドから得られた3次元点群と、建機3Dモデル(バックホウ・クローラダンプ等)を利用して、建機の位置推定を行う手法を開発しました。また、レトロフィット機構を有した建機を用いて、センサポッドにより推定された位置から、追従制御実験を実施しました。
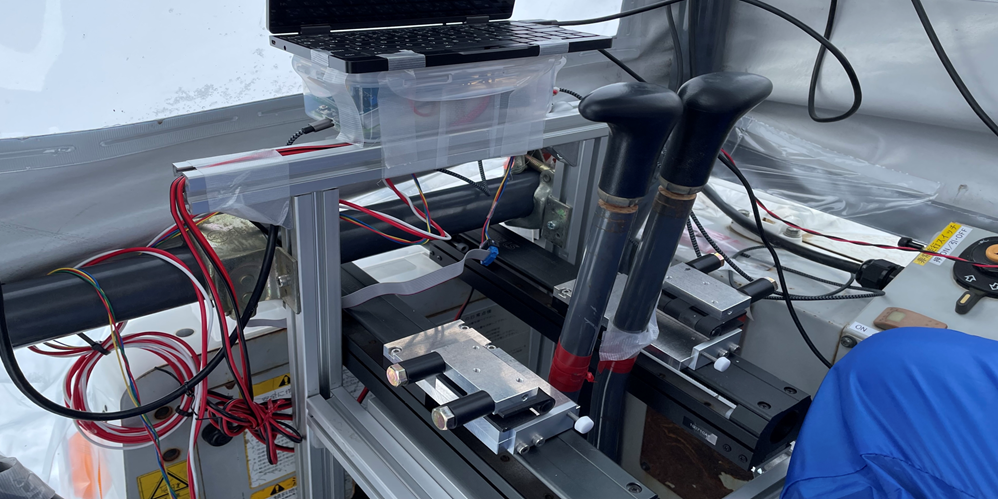
上の写真は、圃場に設置したセンサポッドから得られた3次元点群から、建機の位置を推定している様子です。下の写真は、レバー操作を自動制御するレトロフィット機構です。
お知らせ 一覧へ